Name
ROS2MQTTJsonBridge ROS2 to Cloud MQTT Bridge
Description
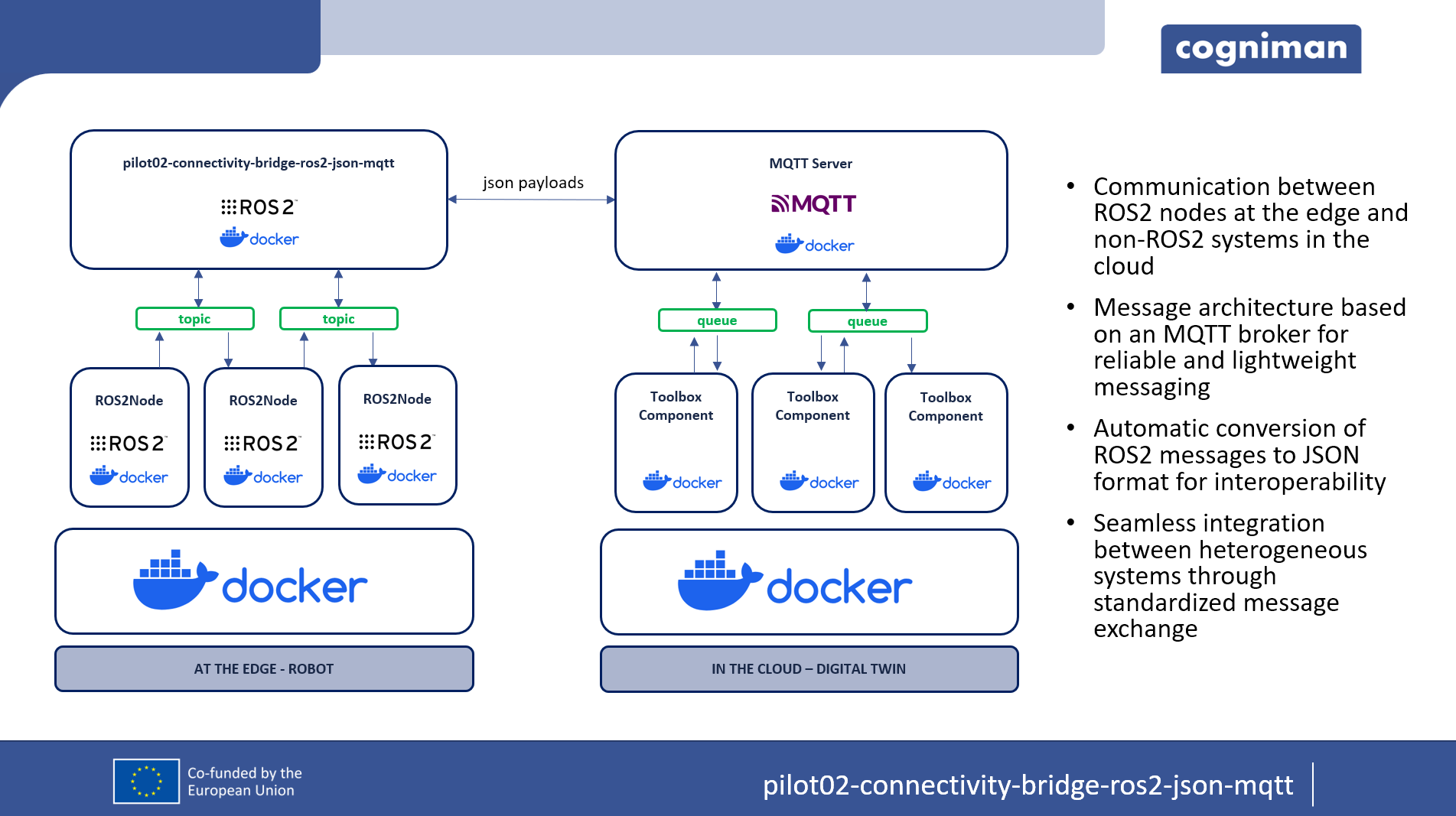
This repository provides a bidirectional bridge between ROS2 and MQTT, enabling message exchange between ROS2 systems and other distributed systems through MQTT brokers using JSON serialization.
Traditional ROS2 systems use binary message formats, which are not easily consumable by many cloud-based or non-ROS systems. Existing solutions like mqtt_bridge are no longer actively maintained. An alternative, mqtt_client, supports bidirectional MQTT communication but transmits messages in a binary format, limiting interoperability.
ROS2MQTTJsonBridge provides a lightweight, extensible, and container-ready solution that enables:
- Bidirectional communication between ROS2 nodes and MQTT clients.
- Automatic serialization and deserialization of ROS2 messages into JSON format for improved interoperability.
- Seamless integration with edge devices running ROS2 and cloud-based MQTT ecosystems.
Features:
- Bidirectional bridging (ROS2 ↔ MQTT)
- Automatic JSON serialization/deserialization for ROS2 messages
- Configurable topic mapping (ROS ↔ MQTT)
- Docker support for containerized deployments
The repository includes the following components:
- Configuration files (how to address the bridge from ROS->MQTT and MQTT->ROS including the automatic serializer and deserializer)
- Docker setup for easy containerization
- A Docker Compose-based test environment to verify end-to-end functionality: ROS publisher → MQTT bridge → MQTT broker → Python MQTT client; Python MQTT client → MQTT broker → MQTT bridge → ROS subscriber.
Type
Tool
Layer
Connectivity
HRL
2.8
Partners

Pilot
To be used in all pilots involving ROS2 for robot integration with the digital twin—particularly the GOIMEK pilot—this component plays a critical role in bridging ROS2-based edge robotics with distributed systems in the cloud. By automatically converting ROS2 messages to and from JSON, it enables seamless interoperability with non-ROS2 components, such as cloud services, monitoring tools, or digital twin platforms. This ensures smooth bidirectional communication and enhances the efficiency of remote supervision and operations.

